电力系统稳定性分析
摘要
本文主要对电力系统的稳定性分析进行了总结与探讨。电力系统的稳定性是指在扰动后系统能够继续稳定运行的能力,分为频率稳定、电压稳定和同步稳定三种类型。本文首先介绍了动态模型分析,重点阐述了同步发电机组在扰动下的运动方程,并分析了励磁调节对系统稳定性的影响。接着,讨论了静态稳定性,包括小扰动下系统恢复能力的分析方法,并通过代数判据(如胡尔维茨判据)进行了定量分析。文章还提出了提高静态稳定性的若干措施,如减小发电机电抗、线路电抗等。最后,本文对暂态稳定性进行了分析,强调了“等面积法则”在系统恢复中的作用,并提出了增强暂态稳定性的措施,如故障快速切除、自动重合闸等。整体而言,本文对电力系统的稳定性分析方法、提升稳定性的措施提供了系统性总结,并为实际电力系统的稳定性评估与优化提供了理论依据。
关键词:电力系统稳定性分析;动态模型;静态模型;定量分析;暂态稳定性;提高稳定性措施
1. 电力系统稳定性分析的动态模型
1.1 电力系统稳定性定义
电力系统稳定性:指电力系统受到一定的扰动后能否继续运行的能力。
- 频率稳定:指电力系统受到一定的扰动后,系统频率能否保持在允许范围内的能力。
- 电压稳定:指电力系统受到一定的扰动后,各节点电压能否继续保持在允许范围内的能力。
- 同步稳定(功角稳定):指电力系统受到一定的扰动后,各发电机组能否继续保持同步运行的能力。
同步发电机组运动方程
同步发电机运动时如下图
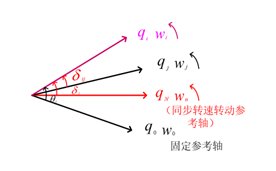
忽略转子损耗时,运动方程为:
其中:
- $M_s = M_m - M_0$(机械转矩与电磁转矩差)
- $\beta$ 为转子角位移
电量对时间求导得:
最终得到标幺值方程:
1.2电力系统稳定性分析的静态模型
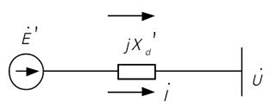
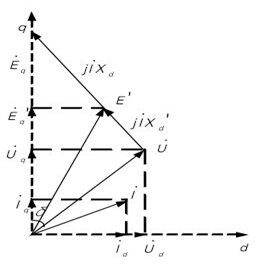
当励磁不调节时($E_q$恒定),系统静态特性由以下方程描述:
展开得:
功率方程为:
代入$U_d = U \sin\delta$、$U_q = U \cos\delta$,得到功角特性:
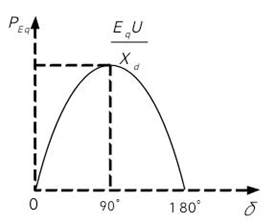
有功功率和无功功率的功角特性:
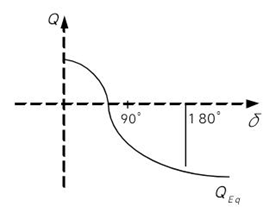
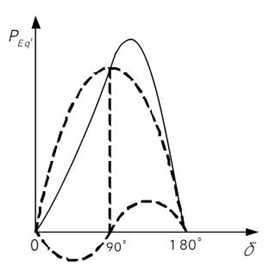
当励磁调节时,则$E_q$会发生变化
有功功率功角特性
2. 电力系统静态稳定性分析
2.1 静态稳定判据
平衡点处功率特性曲线满足:
- 稳定平衡点(如a点):扰动后能恢复
- 不稳定平衡点(如b点):扰动后失稳
2.2 小扰动法分析
线性化微分方程:
电力系统静态稳定性的定量分析
电力系统静态稳定性:指电力系统受到小的扰动后,恢复稳定的能力
平衡点:不考虑损耗时,输入等于输出时的一种状态,即相当于合力等于零的状态。系统正常运行时, $P_m$(输入的机械功率)= $P_e$(输出的电磁功率),其中 Pm使转子加速, $P_e$使转子减速。即在下图中的$a$点和$b$点运行。
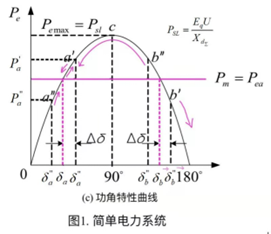
在a点收到扰动后:
① 当系统受到小的干扰,引起功角 $δ$ 增加一个微量 $Δδ$ 时:$Pe$ 从 $P{eb}$ 变到 $P{eb1}$,$δ$ 也将从 $δ_b$ 变到 $δ{b1}$;由于 $Pm$ 恒定,即 $P_m > P{eb1}$,因此当这个扰动消失后,机组将减速,功率角将从 $δ{a1}$ 开始减小。当 $δ$ 从 $δ{a1}$ 减小到 $δ_a$ 时,虽然 $P_m = P_e$,但由于机械惯性的原因,$δ$ 将继续减小。当 $δ$ 小于 $δ_a$ 后,$P_m$ 将大于 $P_e$,机组又将加速,$δ$ 将又增大并通过 $a$ 点;如此循环下去。考虑到摩擦、风阻等损耗,$δ$ 将最终回到 $δ_a$ 的位置,重新达到稳定运行的状态。
② 同样可以分析,当系统受到小的干扰,引起功角 $δ$ 减小一个微量 $Δδ$ 时,也将最终回到 $δ_a$ 的位置。
在有阻尼情况下功角随时间的变化如下图所示
在b点收到扰动后:
① 当系统受到小的干扰,引起功角δ 增加一个微量Δδ时:Pe从 Peb变到 Peb ,δ也将从δb变到δb’;由于Pm 恒定,即Pm> Peb ,因此当这个扰动消失后,机组将加速,功率角δ 将增大;随着 δ的进一步增大,Pe将进一步减小,转子上的不平衡功率(即加速功率)将愈来愈大,使 更进一步增大。这样循环不已,功率角不断增大,运行点不再能回到b,系统失去稳定。功率角的不断增大,标志着两个发电机之间将失去同步,电力系统将瓦解。
② 当系统受到小的干扰, 引起功率角δ 减小一个微量Δ δ 时:Pe从 Peb变到Peb” , δ也将从δb 变到δb1”;由于Pm 恒定,即 Peb”>Pm。因此当这个扰动消失后,机组将减速,功率角 δ将减小; δ的减小将使电磁功率进一步增大,而 Pe的增大又使δ 进一步减小,至c点时,减速的加速度达到最大值; δ通过 δc=90后,将继续减小,但减速加速度将减小;如此变化下去,最终在a点达到新的平衡并稳定运行,但运行点不再回到b点。
在有阻尼情况下功角随时间的变化如下图所示,可观察到系统失稳。
对一、二两种情况的归纳:
功角特性曲线上,虽有两个对应于$P_m=P_e $的运行点$a$、$b$,但其中只有$a$点是可以稳定运行的运行点(称为“稳定的平衡点”);而$b$点是不稳定的运行点(称为“不稳定的平衡点”)。
2.3 胡尔维茨判据
对特征方程:
- 必要条件:所有系数符号相同且$a_0 > 0$
- 充要条件:各阶胡尔维茨行列式均正
各阶胡尔维茨行列式:
示例:二阶系统
2.4静态平衡和提高静态稳定性措施
由图可知,a点稳定平衡点, b点不稳定平衡点。

想要提高静态稳定性有以下措施:
1.减小发电机的电抗
(1)减小变压器的电抗
(2)减小线路电抗:
2.采用分裂导线:
3.单回线变双回线:
4.采用串联电容器补偿:
(1)改善系统的结构
(2)采用自动控制装置(如励磁控制等)
3. 暂态稳定性分析
3.1 等面积法则
系统维持暂态稳定的条件:
能量分析:
- 加速面积:$ W1 = \int{\delta_0}^{\delta_c} P_m d\delta $
- 减速面积:$ W2 = \int{\deltac}^{\delta{\max}} (P_3 - P_m) d\delta $
3.2 提高暂态稳定性的措施
- 故障快速切除:减小加速面积
- 自动重合闸:增加减速面积
- 强行励磁:调节电磁功率
- 快速关闭汽门:限制机械功率
- 电气制动:消耗多余能量
3.3 暂态稳定性提高方向
- 优化保护系统动作时间
- 应用FACTS设备
- 动态无功补偿
参考文献
[1] 付兴贺, 陈锐. 电机中ABC到dq0坐标变换的梳理与辨析[J]. 微特电机, 2021.
[2] 田铭兴等. 交流电机坐标变换理论的研究[J]. 西安交通大学学报, 2002.
[3] IEEE Standard for Power System Stability Analysis. IEEE Xplore.