ADF检验
ADF检验(单位根检验)
根据 P 值(result[1])判断
假设
H0: 非平稳
H1: 平稳
判断
如果 P 值 ≤ 0.05:则反对零假设(H₀): 数据平稳,没有单位根。
如果 P 值 > 0.05:则支持零假设(H₀): 数据非平稳,有单位根。
单位根的存在意味着序列是非平稳的,无法直接用于建模,需要进行差分或其他变换。
1 | import numpy as np |
1 | data['DateTime'] = data['Unnamed: 0'] |
1 | from statsmodels.tsa.stattools import adfuller |
ADF Test Statistic : -21.001664058258655
p-value : 0.0
#Lags Used : 71
Number of Observations Used : 118152
有证据反对零假设(H0),支持备择假设(H1)。没有单位根,是平稳的
1 | import pandas as pd |
确定ARIMA(p,d,q)模型参数
确定d
判断序列是否平稳:
p值 < 0.05:序列平稳,d=0。
p值 ≥ 0.05:序列非平稳,需要差分。
对非平稳序列使用 .diff() 函数进行一次差分,直到序列平稳,看需要差分的阶数。
确定AR和MA的阶数
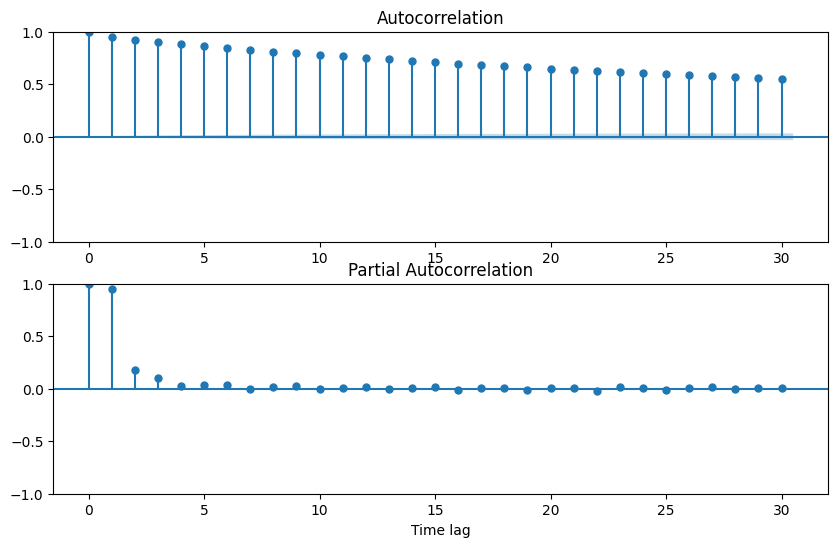
通过分析 ACF(自相关函数) 和 PACF(偏自相关函数) 来选择p和q。
ACF 和 PACF 的作用
- ACF 图:显示序列与其滞后值的相关性,帮助确定q(MA 部分的阶数)。
- PACF 图:显示序列与其滞后值去除中间影响后的相关性,帮助确定p(AR 部分的阶数)。
观察特征
- PACF 图:
截尾(某个滞后阶后骤减为 0):对应 AR 模型的阶数p。 - ACF 图:
截尾:对应 MA 模型的阶数q。
如果两个图均呈指数衰减或振荡,则可能需要混合模型(ARMA 或 ARIMA)。ACF:显示数据随时间滞后逐渐衰减的程度。对于非平稳数据,ACF 通常缓慢衰减;而平稳数据的 ACF 在一定滞后之后会迅速归零。
PACF:帮助识别数据的直接滞后相关性。例如,如果 PACF 在某个滞后阶数后迅速归零,说明可以用少量滞后项捕获数据的主要信息。
1 | # 原始数据ACF和PACF图像 |
1 | # # 差分后的ACF和PACF图像 |
1 | # 前 5000 个点作为样本 |
SARIMAX Results
==============================================================================
Dep. Variable: ActivePower No. Observations: 5000
Model: ARIMA(2, 0, 3) Log Likelihood -30684.066
Date: Thu, 12 Dec 2024 AIC 61382.131
Time: 23:05:03 BIC 61427.752
Sample: 0 HQIC 61398.121
- 5000
Covariance Type: opg
==============================================================================
coef std err z P>|z| [0.025 0.975]
------------------------------------------------------------------------------
const 368.0024 34.537 10.655 0.000 300.310 435.694
ar.L1 0.8269 0.175 4.716 0.000 0.483 1.171
ar.L2 0.1210 0.168 0.720 0.471 -0.208 0.450
ma.L1 -0.0759 0.176 -0.432 0.666 -0.420 0.268
ma.L2 -0.0235 0.037 -0.630 0.529 -0.097 0.050
ma.L3 0.0535 0.009 5.774 0.000 0.035 0.072
sigma2 1.255e+04 99.179 126.571 0.000 1.24e+04 1.27e+04
===================================================================================
Ljung-Box (L1) (Q): 0.00 Jarque-Bera (JB): 62397.70
Prob(Q): 1.00 Prob(JB): 0.00
Heteroskedasticity (H): 0.58 Skew: 0.72
Prob(H) (two-sided): 0.00 Kurtosis: 20.25
===================================================================================
Warnings:
[1] Covariance matrix calculated using the outer product of gradients (complex-step).
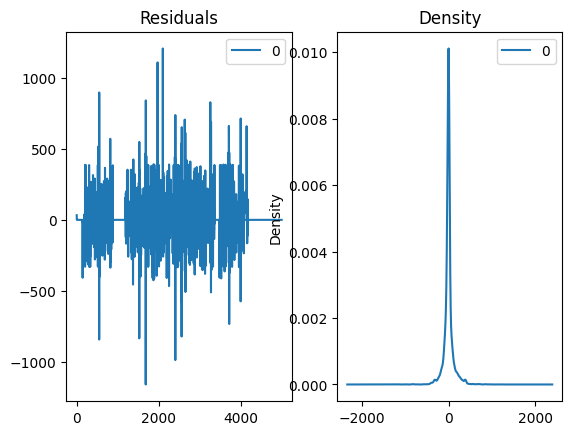
残差分析
残差是评价模型拟合效果的重要依据。理想情况下,残差应该是白噪声(独立同分布的随机变量,均值为 0)。
- 残差图:检查残差是否随机分布。检查残差的分布是否无偏且无明显趋势。如果残差存在明显的趋势或周期性,说明模型拟合不足。
- 残差密度图:检查残差分布是否接近正态分布。如果分布偏离正态分布,可能表明模型未捕获某些特征。
1 | residuals = pd.DataFrame(model_fit.resid) |
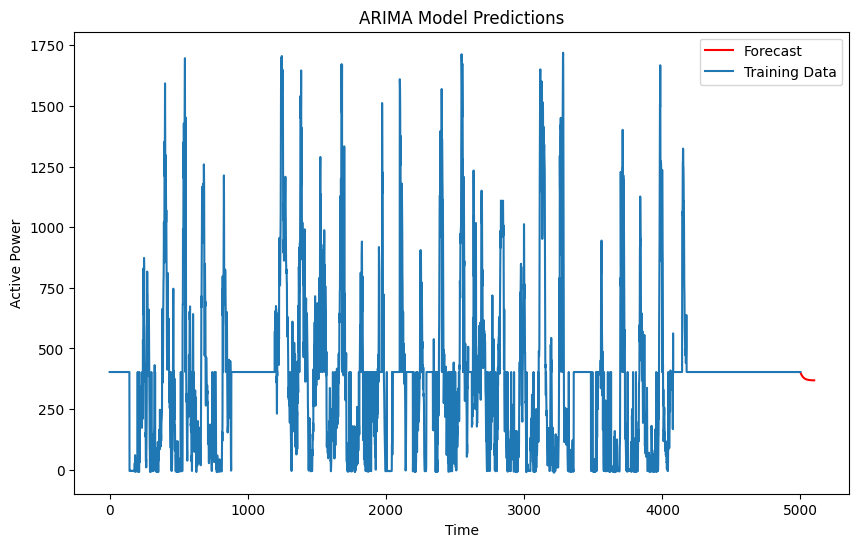
1 | # 将生成预测值与原始数据的对比图。这有助于直观地查看模型的拟合效果以及预测的准确性。预测未来100个时间点 |
1 | # 划分训练集和测试集 |
1 | # 获取预测结果及置信区间 |
各个误差指标的计算方法:
MAPE (Mean Absolute Percentage Error):
- 公式:MAPE = np.mean(np.abs(forecast - actual) / np.abs(actual))
- 用于衡量预测值与实际值之间的百分比误差,值越小越好。
ME (Mean Error):
- 公式:ME = np.mean(forecast - actual)
- 计算预测误差的均值,用于衡量预测的偏差。
MAE (Mean Absolute Error):
- 公式:MAE = np.mean(np.abs(forecast - actual))
- 衡量预测误差的绝对值的平均,越小越好。
MPE (Mean Percentage Error):
- 公式:MPE = np.mean((forecast - actual) / actual)
- 衡量预测误差的百分比,注意,MPE 可能出现正负偏差。
RMSE (Root Mean Square Error):
- 公式:RMSE = np.sqrt(np.mean((forecast - actual)**2))
- 衡量预测误差的标准差,越小越好。
Correlation Coefficient (corr):
- 公式:corr = np.corrcoef(forecast, actual)[0, 1]
- 计算预测值与实际值之间的相关系数,值范围在 -1 到 1 之间,越接近 1 说明预测越准确。
MinMax:
- 公式:minmax = 1 - np.mean(mins / maxs)
- 衡量预测值与实际值之间的最小-最大误差。
1 | def forecast_accuracy(forecast, actual): |
{'mape': np.float64(0.026126326051675634),
'me': np.float64(-10.519893029273199),
'mae': np.float64(10.519893029273199),
'mpe': np.float64(-0.026126326051675634),
'rmse': np.float64(11.600579744847185),
'corr': np.float64(-1.5501431965421824e-15),
'minmax': np.float64(0.02612632605167564)}
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 thewindsing!
评论