多电机控制
工程训练IIB 风力摆A组-多电机控制
天津理工大学
作者:TheWindSing
版本:1.1
时间:2024-1-6
器件说明
主控单片机
型号:
STC89C52RC
参考:
宏晶 STC89C52RC 微控制器实践小书
51最小系统图:
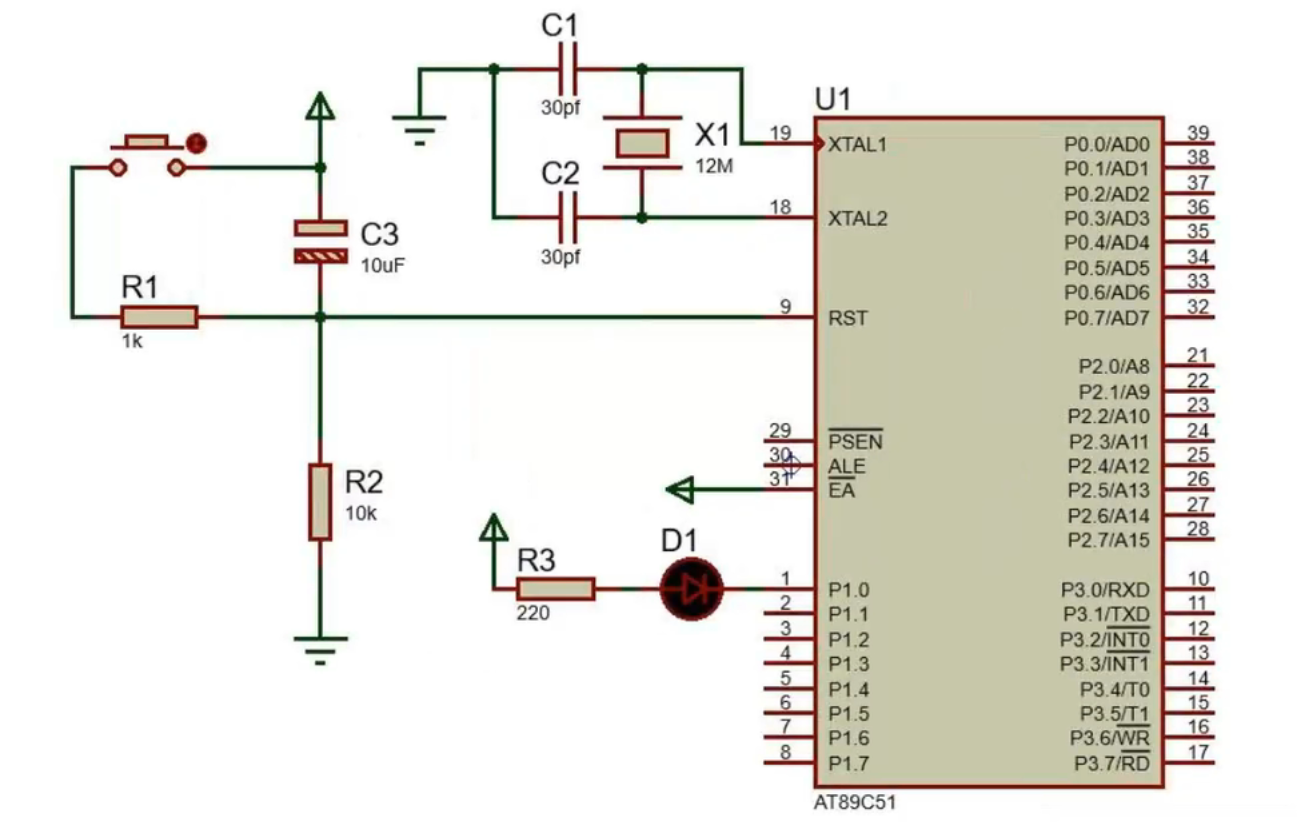
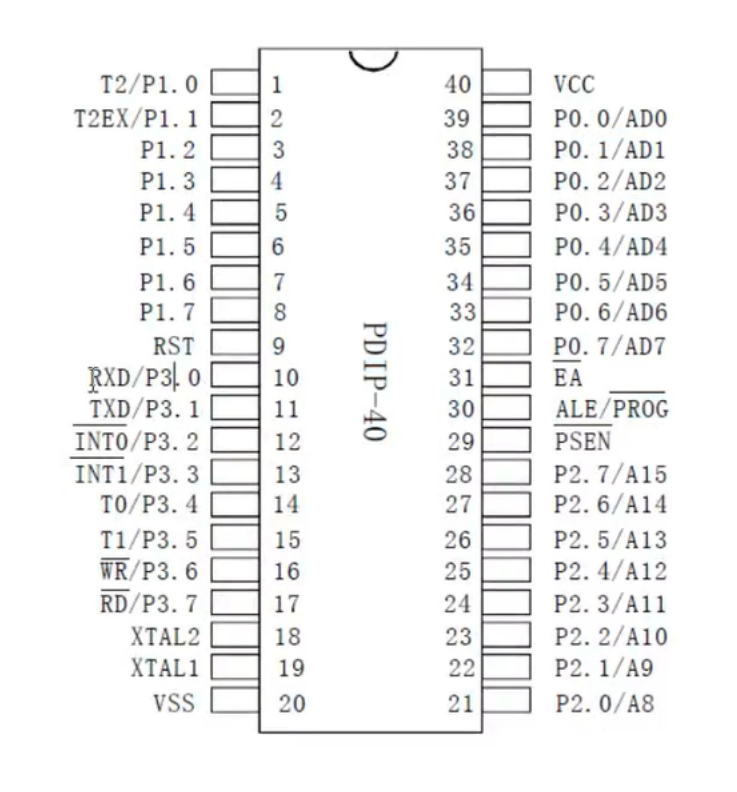
接口图:
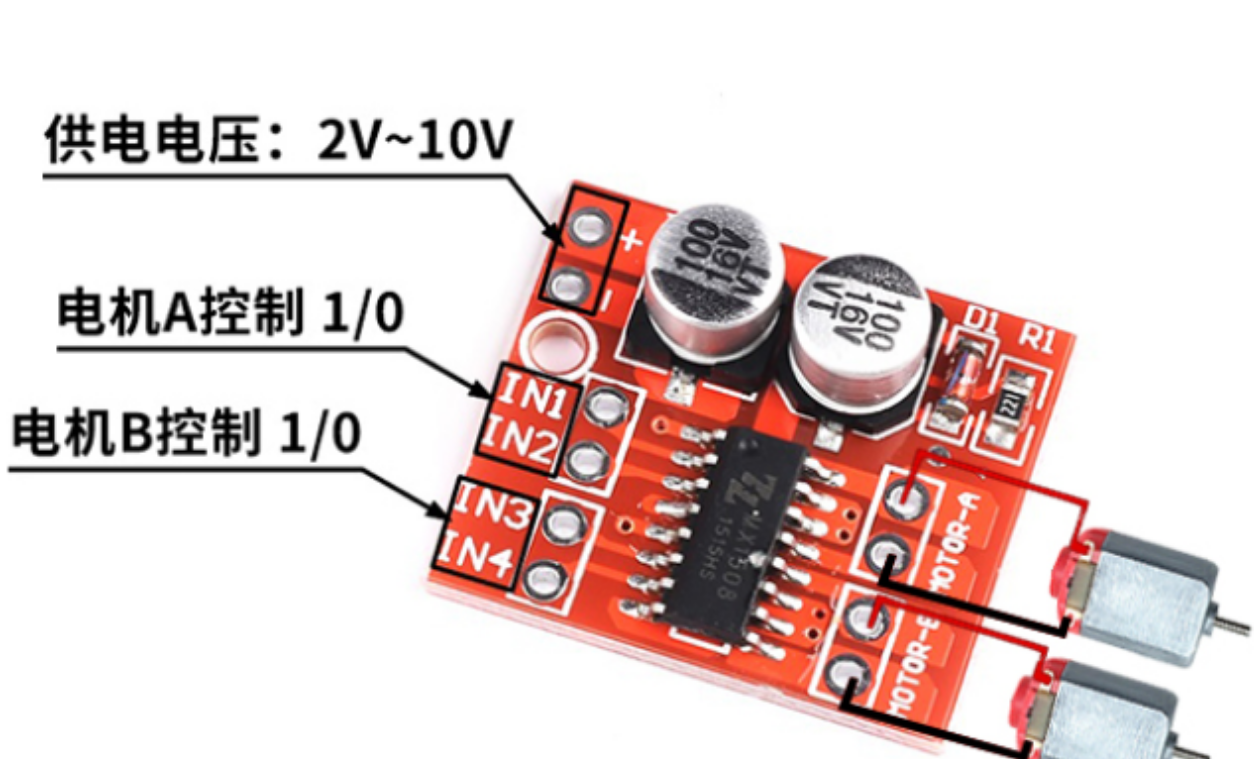
电机驱动芯片
型号:
TC1508A
实物图:
其他
功能实现
单电机单向控制
在Keil中新建STC工程:
一般直接安转完Keil软件中是没有STC的数据库,所以需要我们手动添加。
部分转载KEIL中怎样添加STC系列单片机
打开STC-ISP软件,然后点击Keil仿真设置,点击添加型号和头文件到Keil中 添加STC仿真器驱动到Keil中。
如下图:

之后弹出这个方框,选择好路径。
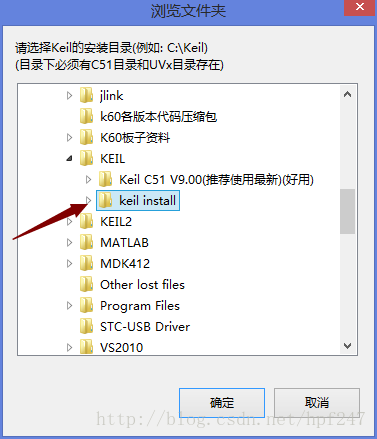
选择你Keil软件安装的路径!
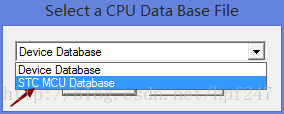
打开Keil软件,选择新建工程,它就会弹出下面这个界面,这时候就可以选择STC MCU Database进行选择STC系列的单片机了。
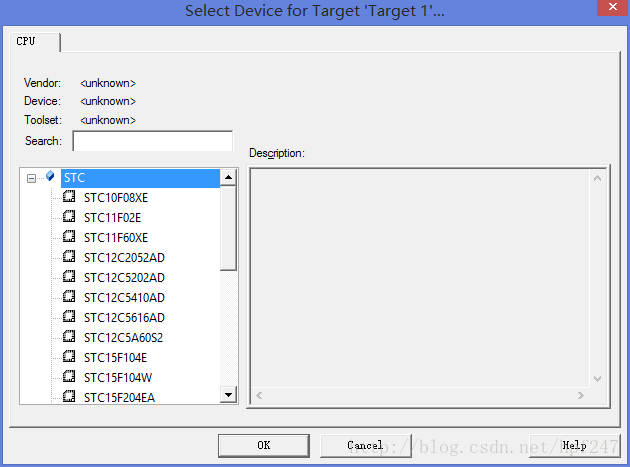
选择STC89C52单片机:
代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| #include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit LED = P2^0;
void DelayMS(uint x)
{
uchar i;
while(x--)
{
for(i=120;i>0;i--);
}
}
void main()
{
while(1)
{
LED = ~LED;
DelayMS(150);
}
}
|
单电机多向控制
实际上可以在Keil这个EDA软件里面直接修改然后写出多电机控制的程序
但是,这里建议采用VScode、Sublime Text、Notepad++等编辑器做进一开发,有利于代码编写和文件管理。
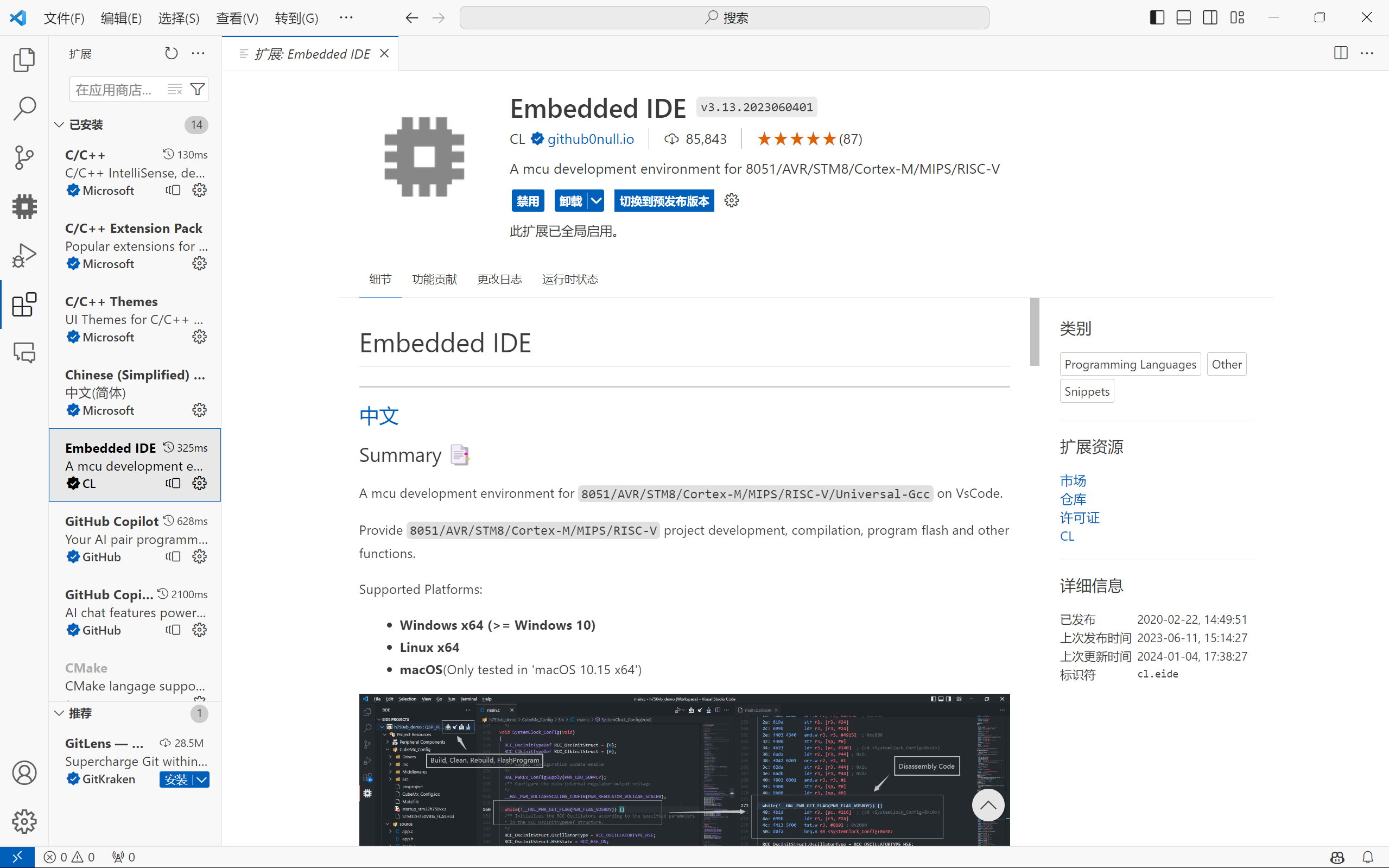
VScode教程:
下载Embedded IDE插件,还可以添加Copilot和C语言编程等插件
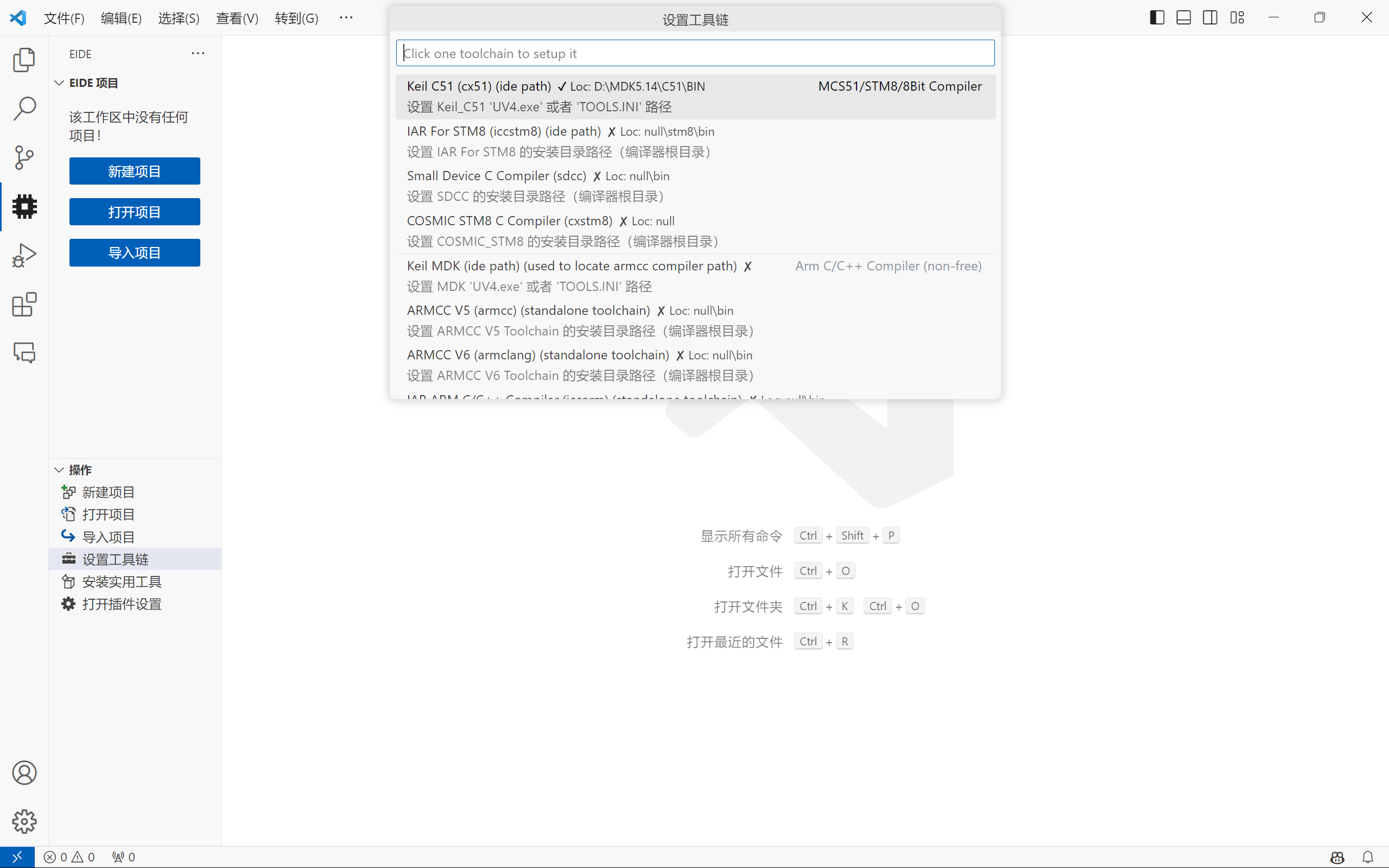
设置工具链:
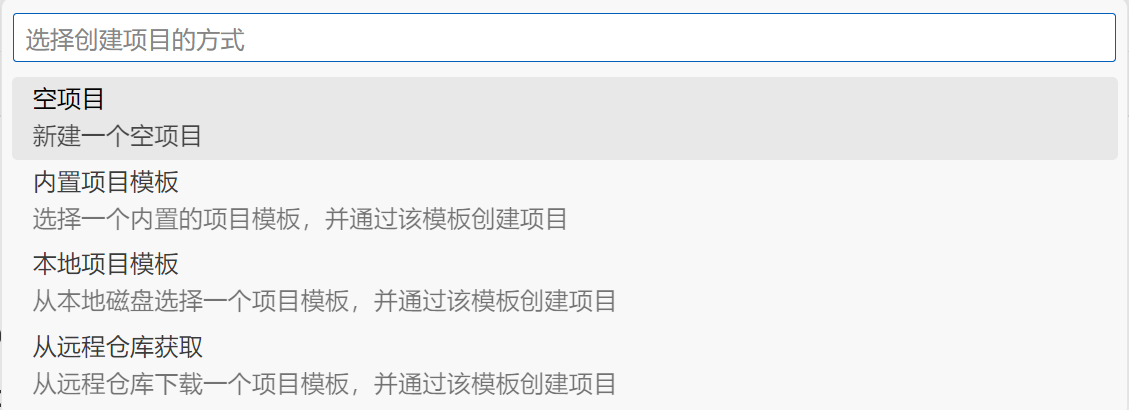
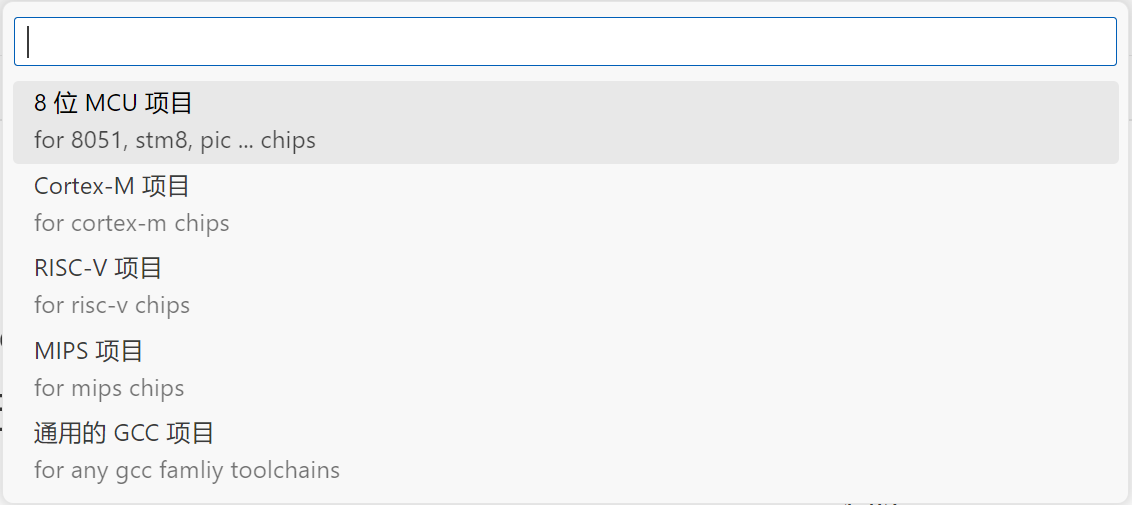
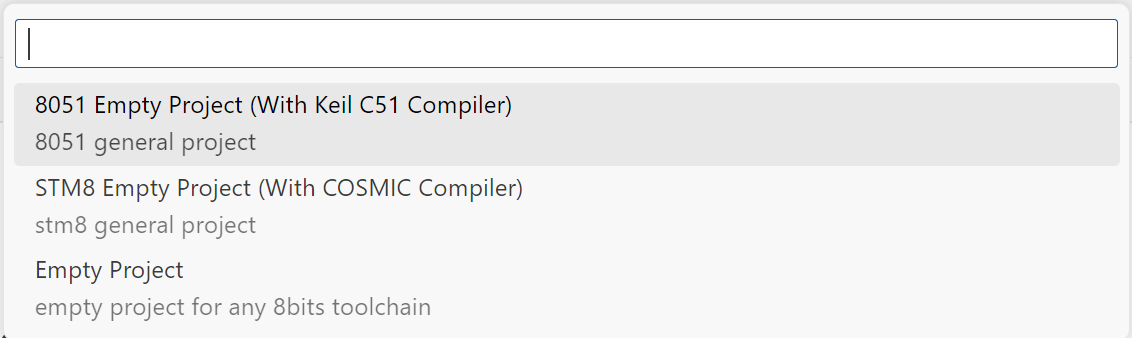
依次新建好项目:
打开项目则需要切换到项目工作区:
控制一个电机正反方向旋转代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
| #include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
uchar time,count=100,flag=1;
sbit PWM1=P2^0;
sbit PWM2=P2^1;
sbit key_turn=P3^7;
void delayxms(uint z);
void Motor_turn(void);
void timer0_init(void);
void main(void)
{
timer0_init();
while(1)
{
Motor_turn();
}
}
void delayxms(uint z)
{
uint x,y;
for(y=z;x>0;x--)
for(y=110;y>0;y--);
}
void Motor_turn(void)
{
if(key_turn==0)
{
delayxms(2);
if(key_turn==0)flag=~flag;
while(!key_turn);
}
}
void timer0_init(void)
{
TMOD=0x01;
TH0=(65536-10)/256;
TL0=(65536-10)%256;
TR0=1;
ET0=1;
EA=1;
}
void timer0_int(void) interrupt 1
{
TR0=0;
TH0=(65536-10)/256;
TL0=(65536-10)%256;
TR0=1;
if(flag==1)
{
PWM1=0;
time++;
if(time<count)PWM2=1;
else PWM2=0;
if(time>=100)time=0;
}
else
{
PWM2=0;
time++;
if(time<count) PWM1=1;
else PWM1=0;
if(time>=100)time=0;
}
}
|
电路布局:
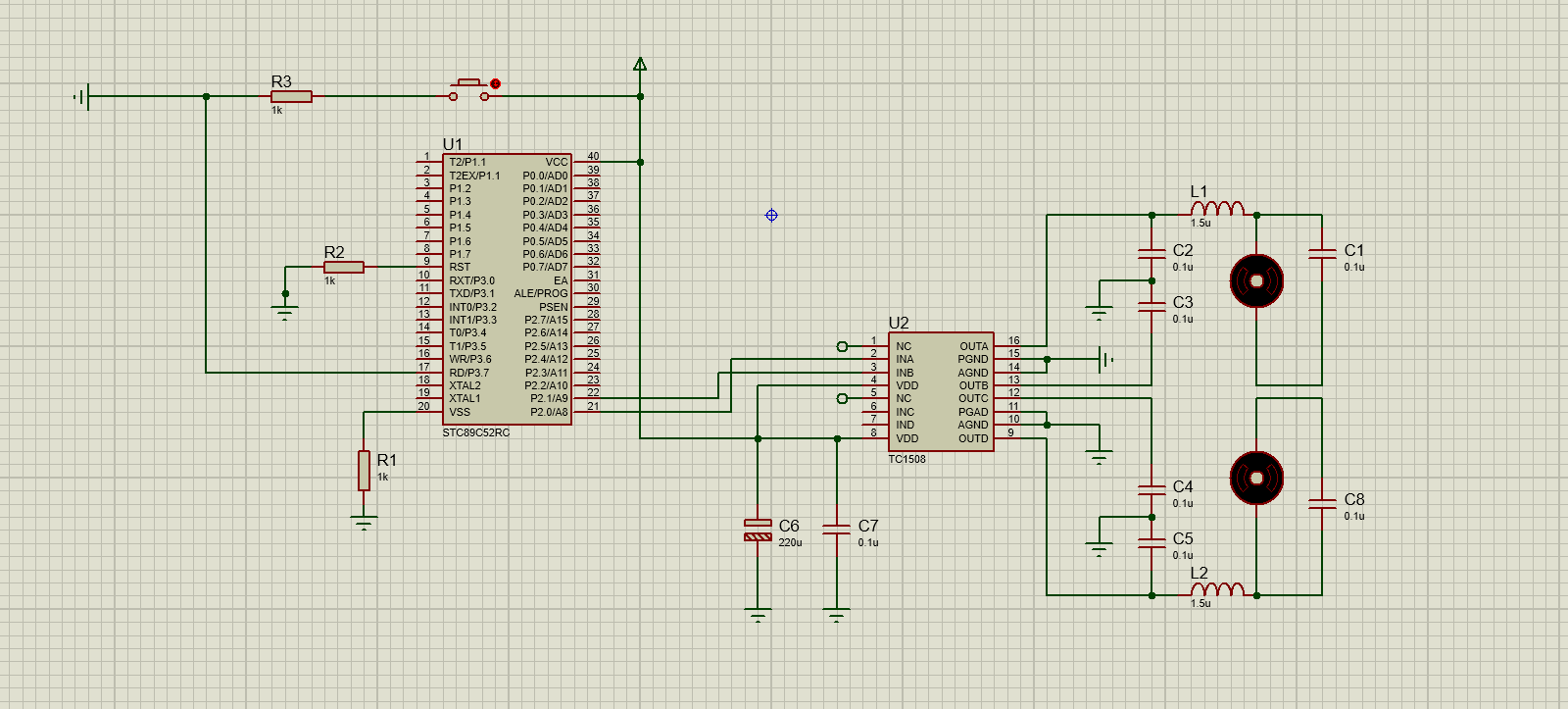
这里由于器件限制省略了复位部分,器件充足的情况下最好加上。
多电机多向控制
Porteus画电路图:
由于Porteus没有STC89C52和TC1508等器件,可以用如AT89C52等其他类似器件代替,或者自己制作示意元件封装。
这里只需画出示意电路,故简单选择后者。
自己制作元件并进行封装
添加部分代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
sbit PWM1=P2^0;
sbit PWM2=P2^1;
sbit PWM3=P2^2;
sbit PWM4=P2^3;
void timer0_int(void) interrupt 1
{
TR0=0;
TH0=(65536-10)/256;
TL0=(65536-10)%256;
TR0=1;
if(flag==1)
{
PWM1=0;
PWM3=0;
time++;
if(time<count)PWM2=1;
else PWM2=0;
if(time>=100)time=0;
}
else
{
PWM2=0;
PWM4=0;
time++;
if(time<count) PWM1=1;
else PWM1=0;
if(time>=100)time=0;
}
}
|
电路图:
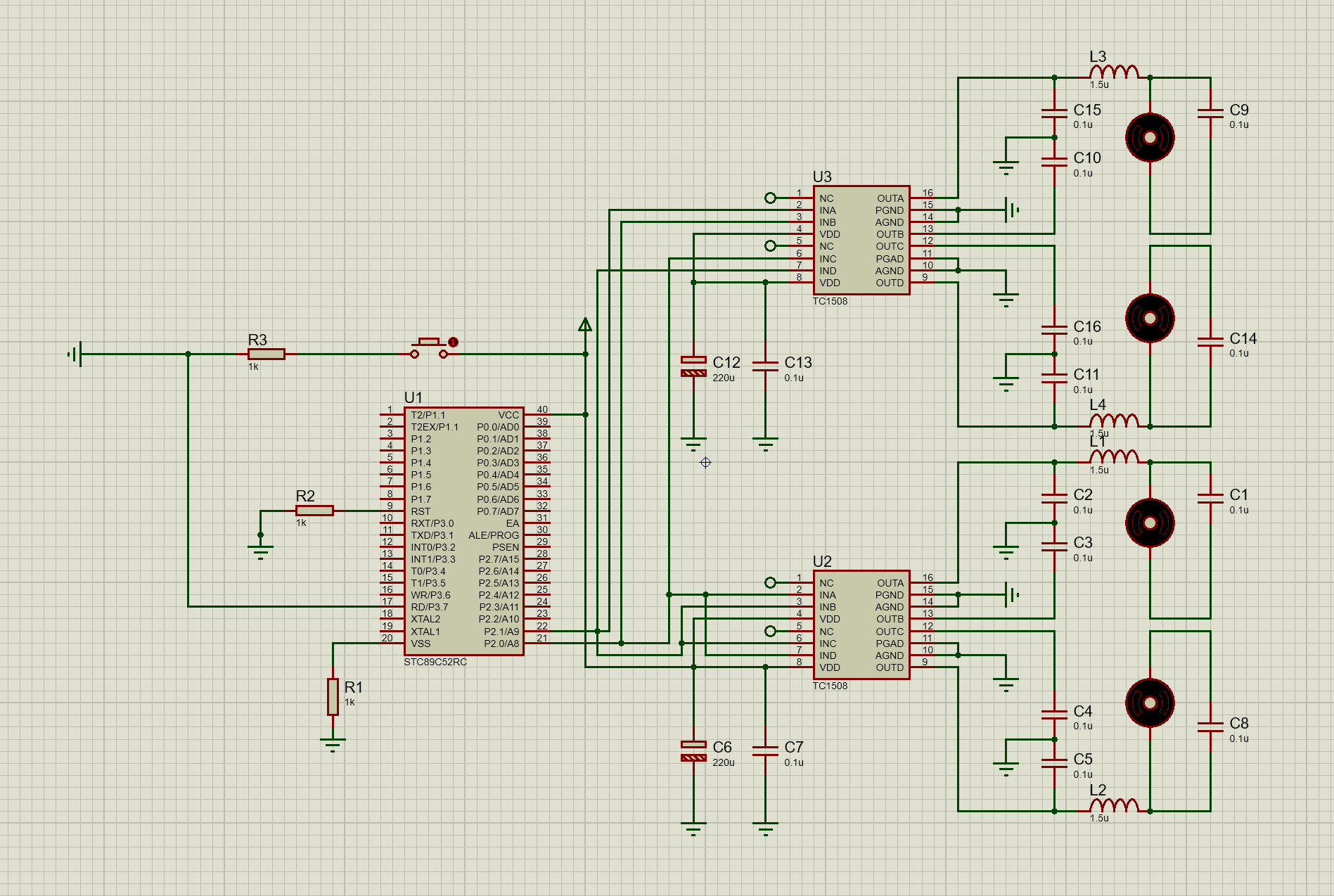
因为只有一个按钮,所以想控制多种运动方式只能直接自己上手拔线了。。。TUT
就此,通过手动拔线控制已经可以实现前后左右以及斜向45°八个方向的摆动了。